

ECO400
General controller
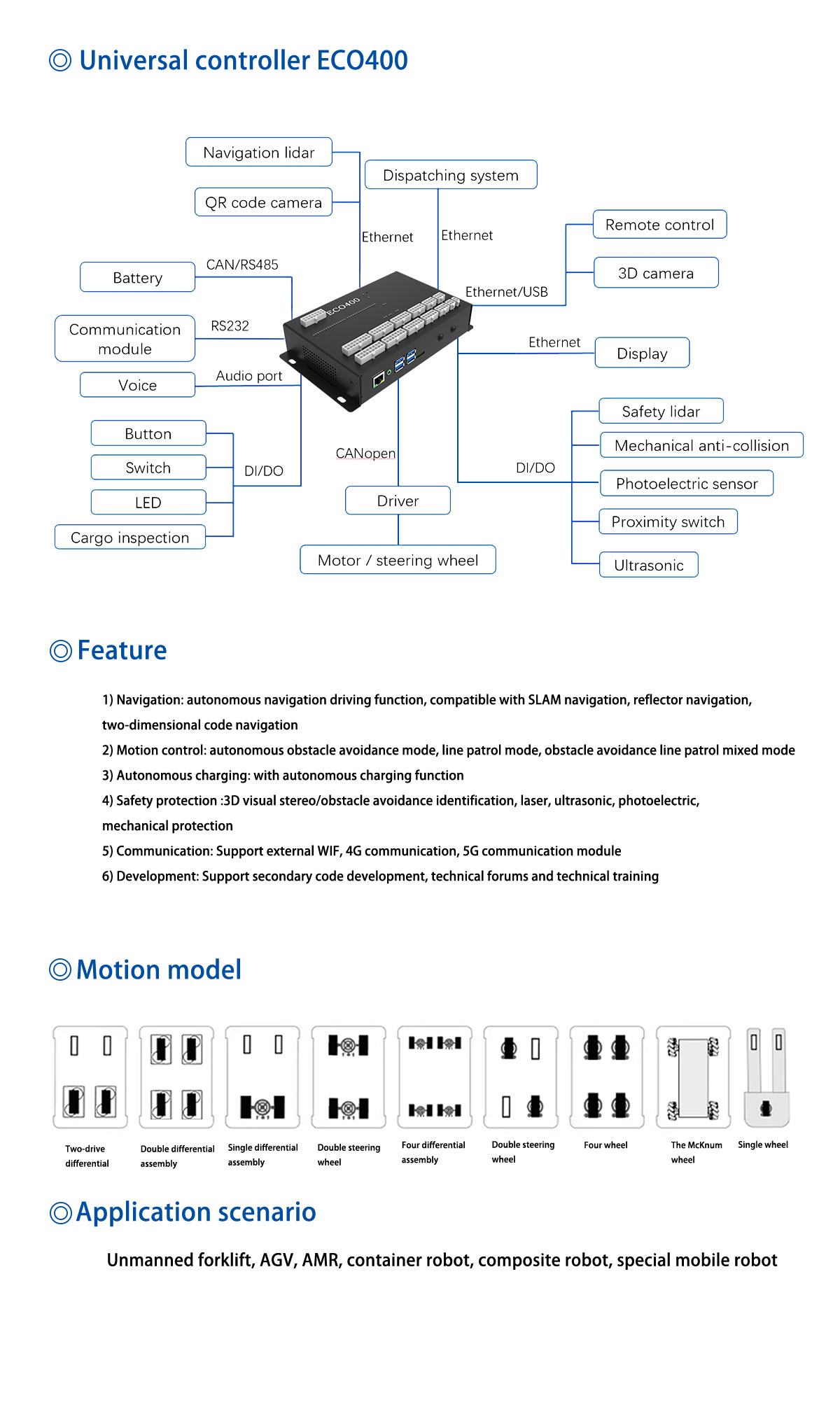
Self-developed motion controller, suitable for various types of mobile robot products. The motion controller adopts industrial chip, compatible with many communication protocols, including CAN bus, TCP/IP network protocol; Rich external interface, can be connected to a variety of sensors (laser navigation radar, navigation camera, anti-collision laser head, ultrasonic, DC/servo motor driver, steering wheel, etc.); The external equipment adopts wire harness design, which makes the robot wiring neat and beautiful, simple assembly and easy maintenance.
| Functional item | argument |
| Model number | ECO400 |
| Length * width * height | 220*132*50mm |
| Power source | |
| Input voltage | 18~28V/Vpp<200m (with reverse protection) |
| Current dissipation | Single unit < 0.4A/24V, including peripherals maximum current < 3A (24V) |
| Communication interface | |
| Ethernet | 1000M RJ45 *1 |
| USB3.0 | * 4 |
| CAN | * 2 |
| RS485 | * 2 |
| RS232 | * 2 |
| Input/output interface | |
| input | 5V~24V optocoupler isolated input *16 |
| exportation | 2A/NMOS isolation output * 16 |
| Analog input | |
| ADC input | * 4 |
| Analog output | |
| Differential output | * 4 |
| Coded input | |
| Quadrature coded input | * 4 |
| Audio interface | |
| Voice broadcast | Support (3.5mm audio interface) |
| Indicator port | |
| Working light | Running status indicator, communication indicator |
| Functional parameter | |
| Positioning accuracy | ±5mm (Reflector navigation), ±10mm (SLAM natural navigation) |
| Navigation speed | ≤1.5m/s |
| Angle control accuracy | ±0.5° |
| Motion control | Autonomous obstacle avoidance driving, fixed route driving, obstacle avoidance fixed route mixed driving |
| Map Area (Single map) | ≤400000㎡ (Support multi-map navigation) |
| Motion model | |
| Differential motion model | Two drive differential speed, four drive differential speed |
| Wheel motion model | Single steering wheel, double steering wheel, three steering wheel, four steering wheel |
| Other motion models | Differential assembly, McNum wheels, other customized chassis |
| Other Functions | |
| Scheduling system | Optional |
| Supporting design software | support |
| Supporting application software | support |
| Automatic charging | support |
| External touch screen | support |
| Pallet identification | support |
| Visual orientation | support |
| Material leg identification | support |
| Following up function | support |
| Secondary location of markers | support |
| Navigation laser assisted obstacle avoidance | support |
| 3D visual obstacle avoidance | support |
| Secondary development of functional logic | support |
